by RC Irace
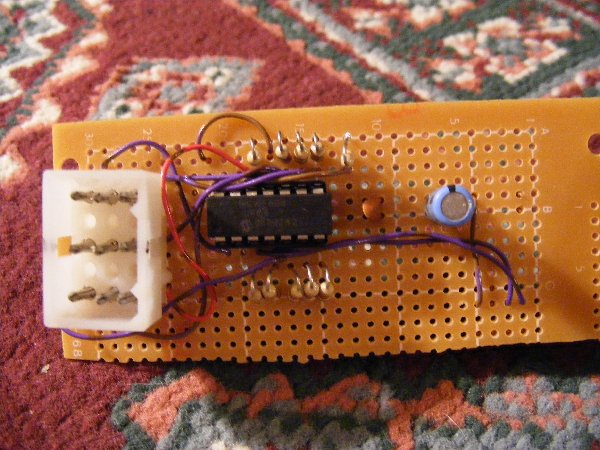
This interface uses a PIC 16F688 Microcontroller which is wired to the
Teaching Pendant Connector (molex style). It is used to simulate most of the functions
on the Teaching Pendant Controller. The 5V power for the PIC
is supplied by this connector.
A Cinema7 (One for All) IR Remote programmed for Sony DVD is used to
replace the wired "Teaching Pendant" supplied with the Hero I Robot.
The program is in MikroC. Please see comments for keypad layout.
This circuit was built and tested fine. It is, of course, to be used at your own risk.